Salut à tous,
Je suis en train de travailler sur un projet pour analyser les maps dofus avec openCV.
Pour faire ca j'ai utiliser OpenCV pour analyser la map (en combat).
Bon mais comment faire:
Déjà il faut un screen de la map (logique), OpenCV a des fonction pour détourer/contourer les formes, malheureusement ca ne marche pas directement :'(.
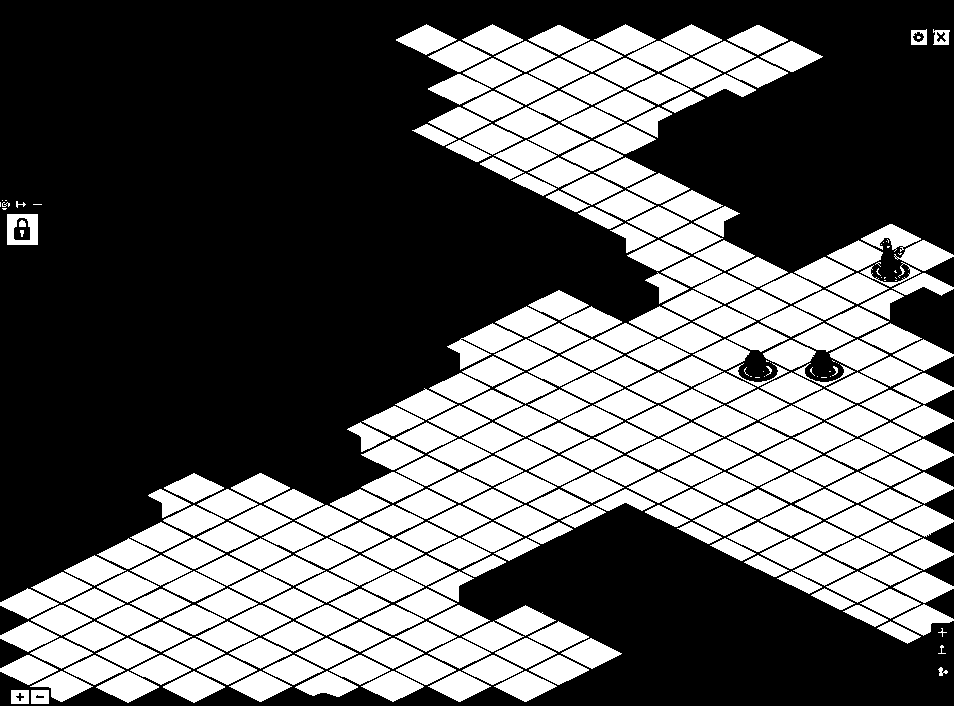
Il faut donc jouer avec le niveau de gris pour mètre en évidence les formes que l'on cherche.
Pour les cases "walkable" voila ce que ca donne:
Ensuite il suffit d'appliquer la fonction findContours et on a toute les cases (ou presque enfaite):
![img]()
Bon après quelque ajustement on arrive a ca (si on regarde la taille des cells ect...):
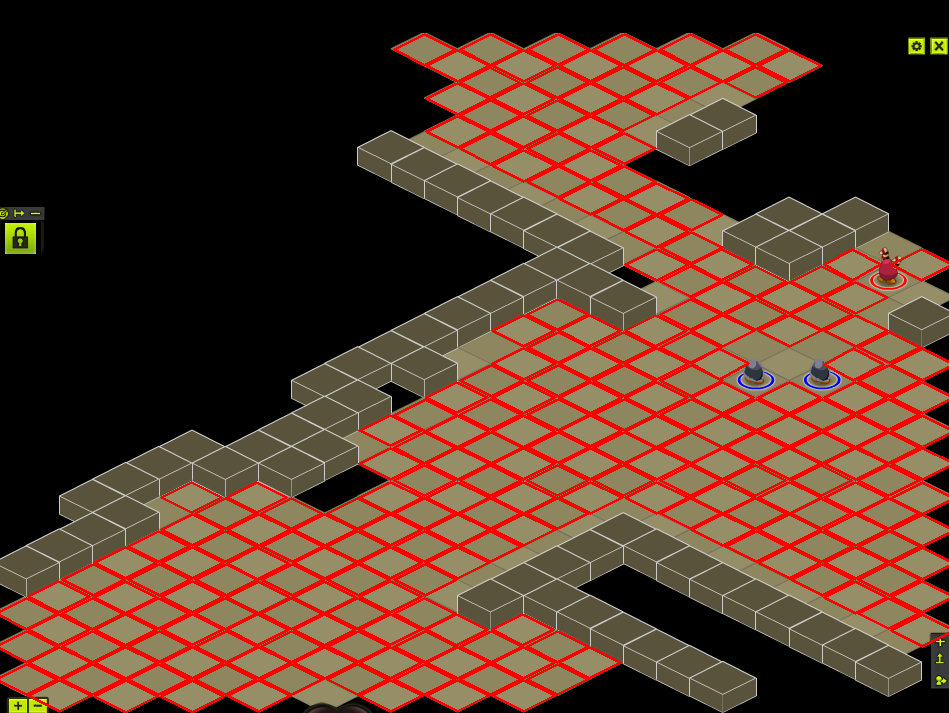
Malgré ca il manque toujours quelque cell surtout ou bort des murs, bon heureusement y une solution, on traite tout les cells qu'il arrive a faire du première coups (pour avoir les info des cells en moyen le width/height/X/Y), grâce a ca on peut les replacer et les mettre a la bonne taille ce qui donne:
Bon pour les mobs une on chercher juste l'image du mob dans la map et on a leurs position (malgré que cv2 est chiant avec les images qui on du transparent).
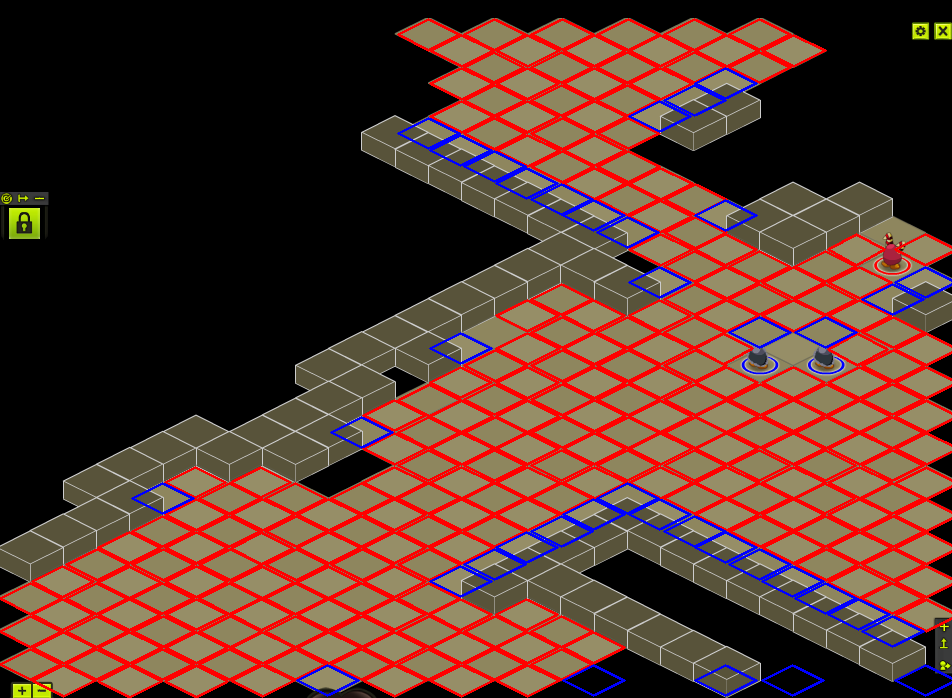
ps: j'ai oublier de parler des cells qui bloque la vue mais c'est le même procéder mais avec des paramètres diffèrents le but et toujours de faire ressortir les informations dont on a besoin.
Le résultat final est assez satisfaisant, mais il reste encore des améliorations.
![img]()
import cv2
import numpy as np
import matplotlib.pyplot as plt
import os
class Map:
def __init__(self):
pass
def show_map(self, img_draw):
img_draw = np.ascontiguousarray(img_draw, dtype=np.uint8)
_, img_draw2 = cv2.threshold(img_draw, 0, 0, cv2.THRESH_BINARY)
self.get_wallkable_cell((img_draw.copy()), [], img_draw2)
self.get_break_cell((img_draw.copy()), [], img_draw2)
self.show_monster((img_draw.copy()), [], img_draw2)
cv2.imshow("Losanges", img_draw2)
cv2.waitKey(10)
def get_wallkable_cell(self, img, cases_coords, img_draw):
lower = (120, 120, 120)
upper = (255, 255, 255)
mask = cv2.inRange(img, lower, upper)
# Appliquer le masque pour remplacer les pixels blancs par du noir
img[mask > 0] = (0, 0, 0)
# Convertir l'image en niveaux de gris
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Appliquer un seuillage pour mettre en évidence les contours
_, threshold = cv2.threshold(gray, 130, 255, cv2.THRESH_BINARY)
contours, _ = cv2.findContours(threshold, cv2.RETR_CCOMP, cv2.CHAIN_APPROX_SIMPLE)
width_sum = 0
height_sum = 0
count = 0
list_invalid = []
cases_coords = {}
list_x_pair = []
list_y_inpair = []
index = 0
for contour in contours:
approx = cv2.approxPolyDP(contour, 0.09 * cv2.arcLength(contour, True), True)
if len(approx) == 4:
x, y, w, h = cv2.boundingRect(approx)
#list_invalid.append(approx)
if w > 55 and h > 27:
width_sum += w
height_sum += h
count += 1
y = self.get_closer_y_or_create(cases_coords, y)
if(cases_coords[y] == []):
index += 1
if index % 2 == 0:
list_x = list_x_pair
else:
list_x = list_y_inpair
for try_x in list_x:
if x > try_x - 15 and x < try_x + 15:
x = try_x
if x not in list_x:
list_x.append(x)
if x not in cases_coords[y]:
cases_coords[y].append(x)
points = np.array([[x, y + int(h/2)], [x + int(w/2), y], [x + w, y + int(h/2)], [x + int(w/2), y + h]], np.int32)
points = points.reshape((-1, 1, 2))
cv2.polylines(img_draw, [points], True, (0, 0, 255), 2)
else:
list_invalid.append(approx)
for approx in list_invalid:
x, y, w, h = cv2.boundingRect(approx)
if w > 55/3 and h > 27/4:
y = self.get_closer_y_or_create(cases_coords, y, True)
index = list(cases_coords.keys()).index(y)
if index % 2 != 0:
list_x = list_x_pair
else:
list_x = list_y_inpair
if(len(list_x) == 0):
return
x = self.closest_value(list_x, x)
if x in cases_coords[y]:
continue
w = int(width_sum/count)
h = int(height_sum/count)
points = np.array([[x, y + int(h/2)], [x + int(w/2), y], [x + w, y + int(h/2)], [x + int(w/2), y + h]], np.int32)
points = points.reshape((-1, 1, 2))
cv2.polylines(img_draw, [points], True, (255, 0, 0), 2)
cases_coords[y].append(x)
def closest_value(self, input_list, input_value):
arr = np.asarray(input_list)
i = (np.abs(arr - input_value)).argmin()
return arr
def get_closer_y_or_create(self, cases_coords, y, force = False):
if list(cases_coords.keys()) == []:
cases_coords[y] = []
closer = self.closest_value(list(cases_coords.keys()), y)
if(not force and not (y >= closer - 10 and y <= closer + 10)):
cases_coords[y] = []
closer = y
return closer
def get_break_cell(self, img, cases_coords, img_draw):
lower = (80, 80, 80)
upper = (255, 255, 255)
mask = cv2.inRange(img, lower, upper)
# Appliquer le masque pour remplacer les pixels blancs par du noir
img[mask > 0] = (0, 0, 0)
# Convertir l'image en niveaux de gris
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Appliquer un seuillage pour mettre en évidence les contours
_, threshold = cv2.threshold(gray, 80, 100, cv2.THRESH_BINARY)
# Trouver les contours
contours, _ = cv2.findContours(threshold, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# Boucle sur les contours
for contour in contours:
approx = cv2.approxPolyDP(contour, 0.02 * cv2.arcLength(contour, True), True)
if len(approx) == 4:
x, y, w, h = cv2.boundingRect(approx)
if w > 55 and h > 27:
y += 20
points = np.array([[x, y + int(h/2)], [x + int(w/2), y], [x + w, y + int(h/2)], [x + int(w/2), y + h]], np.int32)
points = points.reshape((-1, 1, 2))
cv2.polylines(img_draw, [points], True, (150, 150, 150), 2)
cases_coords.append((x,y))
cases_coords_walkable = []
cases_coords_line_break = []
def show_monster(self, img, monster_coords, img_draw):
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
monster_folder = "Monstre"
monster_images = os.listdir(monster_folder)
threshold = 0.8
for image_name in monster_images:
fg_img = cv2.imread(os.path.join(monster_folder, image_name), cv2.IMREAD_UNCHANGED)
fg_img = cv2.cvtColor(fg_img, cv2.COLOR_BGR2GRAY)
result = cv2.matchTemplate(img, fg_img, cv2.TM_CCOEFF_NORMED)
w, h = fg_img.shape[::-1]
loc = np.where(result >= threshold)
for pt in zip(*loc[::-1]):
center = (int(pt[0] + w/2), int(pt[1] + h/2))
cv2.circle(img_draw, center, int(max(w,h)/2), (255,0,0), 3)
if __name__ == "__main__":
test = Map()
test.show_map(cv2.imread("map.png"))
cv2.waitKey(0)